PG001 データシートの表示(PDF) - Allegro MicroSystems
部品番号
コンポーネント説明
メーカー
PG001 Datasheet PDF : 12 Pages
| |||
PG001M
PARALLEL-TO-SERIAL
DATA CONVERTER
CLOCKOUT, SERIAL DATAA, SERIAL DATAB, and
STROBE. In the full-step modes the clock, data, and
strobe pulses are 1/8 the input clock rate; while half-step
operation produces 'bursts' at 1/4 the input clock rate.
Further, quarter-step mode signals correspond to 1/2 the
input clock frequency; while during microstepping the
signal 'bursts' equal the input clock rate. Hence, the step
rate is always 1/8th the input clock frequency, regardless of
the operating mode. Obviously, the clock rate increases
while accelerating, becomes constant during slewing, and
decreases as the step motor and load are decelerating.
Microstepping Operation
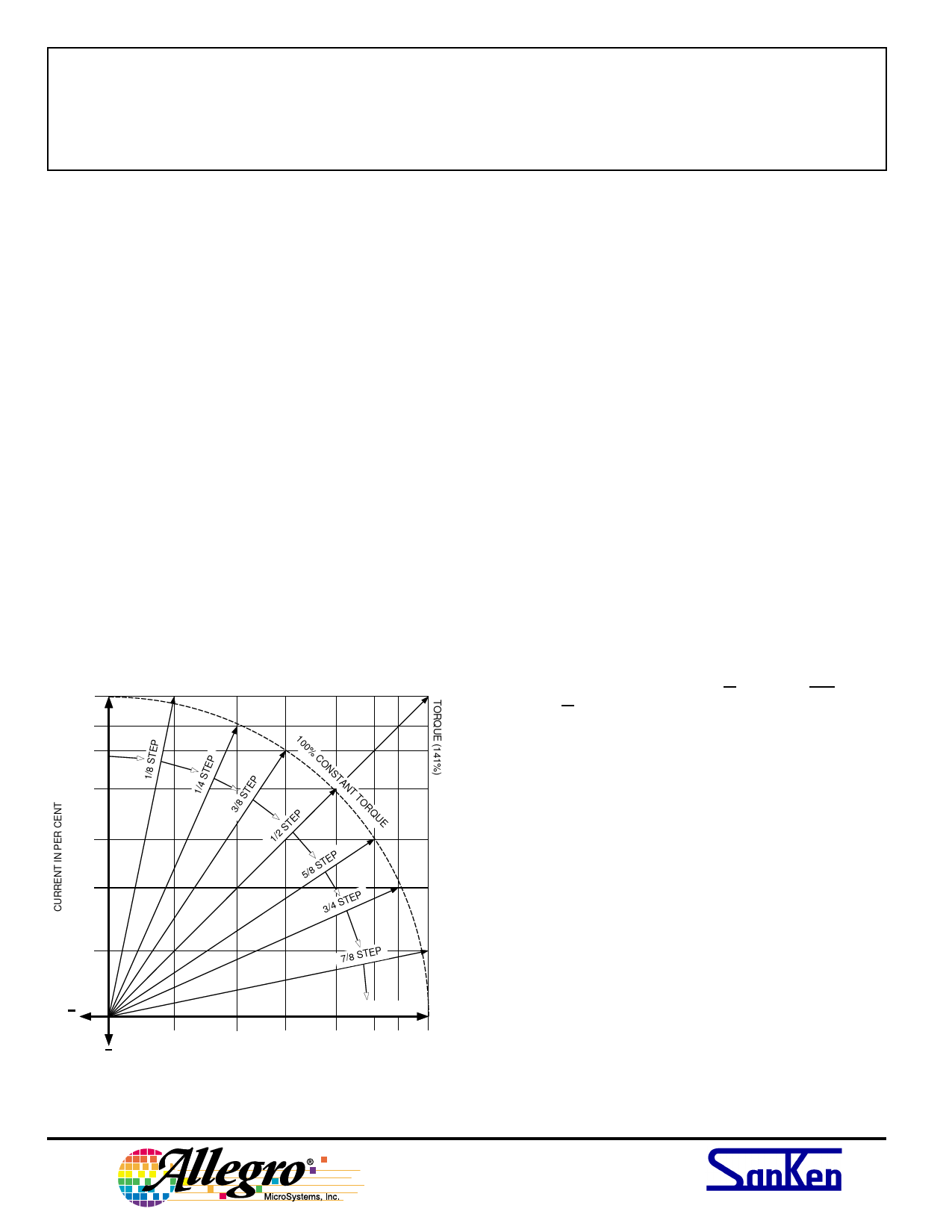
Figures 1 and 2 illustrate the incremental eight step
divisions provided while microstepping. The 3-bit se-
quence from 0 through 8 provides smooth, constant-torque
operation that is delivered to the motor/load by the
SLA7042M or SLA7044M power multi-chip modules.
The circle in figure 1 and the arc in figure 2 represent
the constant-torque vectors. Slight discrepancies are
evident when examining the vector 'arrows'. The disparity
is insignificant, and will not affect smooth, resonance-free
motion. However, it may affect realizing accurate and
precise intermediate positioning. Subdividing steps into
A
100
91
83
71.4
55.5
40
MAXIMUM FULL-STEP
100%
1/2 STEP
CONSTANT TORQUE
5/8 STEP
3/4 STEP
20
7/8 STEP
FULL STEP
B
B
20
40
55.5
71.4 83 91 100
A
CURRENT IN PER CENT
Dwg. GK-020
Figure 2 — Current/Displacement Vectors
eight distinct, exact positions is often very challenging.
Clearly, variation in the phase currents affects rotor
displacement, and is a very crucial factor in resolving
accurate, intermediate step divisions.
Another critical factor to realizing precise, repeatable
step subdivisions pertains to the selection and evaluation
of the step motor. The better motors exhibit uniformly
spaced positioning characteristics. However, torque vs
displacement characteristics vary (often greatly). Usually,
precise step subdivisions require motors designed for
microstepping.
An 'Integrated' Microstepping Design
The combination of CMOS controller IC and
microstepping power module is depicted in figure 3. The
µP provides the needed logic signals that reset the counter,
control rotor direction, determine the operating mode, and
change the current/torque vector (during full-step, 2-phase
operation).
The sequencing logic provides a 'readback' signal (the
MO output) that switches LOW at the half-step position
when the microcontroller can shift control modes and not
incur oscillation/vibration problems. The mode change is
allowed at the 45° vector, half-step position shown in
figure 2. In addition to the 45° AB vector, three other half-
step vectors occur during stepping: AB at 135°, AB at
225°, and AB at 315° (figure 1). These current vectors
correspond to the half-step positions in four quadrants, and
four 2-phase, full steps of rotation.
The Parallel-to-Serial Conversion
Perhaps the greatest system advantage for designers is
the simplification of software. Controlling and operating
the SLA7042/44M power multi-chip modules directly
would require programming the system µP to provide and
update serial data to both the A and B inputs, and signals
to the clock and strobe inputs that control the A and B
sections of the driver.
Although designs utilizing the CMOS control IC
require seven I/O lines, the software program will be
simpler and shorter. The system µP provides logic signals
that control RESET, CCW/CW (direction), MODE
SELECT1, MODE SELECT2, VECTOR CONTROL, and
read the MONITOR return. Only the CLOCK input is a
'dynamic', constantly switching signal from the system
control I/O.
115 Northeast Cutoff, Box 15036
™
Worcester, Massachusetts 01615-0036 (508) 853-5000
Share Link: 